Circuit Breaker Interview Questions And Answers Part-1
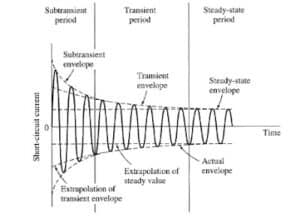
Circuit breaker interview questions and answers are very important in view of the job interviews. We shall discuss in detail the questions in this post.
Circuit breaker interview questions and answers are very important in view of the job interviews. We shall discuss in detail the questions in this post.

Transformer Interview Questions & Answers Part-4: In this section we shall discuss more questions on transformer. Why is flux constant in transformer? The net MMF

What is the definition of Transformer? What is a transformer? A transformer is a static piece of electrical equipment which transform the voltage from one

What is “voltage regulation” in a transformer? Voltage regulation of transformer is defined as the percentage change in the transformer secondary voltage from no load to

What is BDV Test of transformer oil? The transformer oil is used in the transformer for insulation as well as for cooling purpose. The different
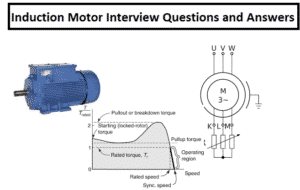
Induction Motor Interview Questions and Answers is very important for competitive exams and interview purpose. The below questions and answers are very conceptually explained What
Three Phase Induction Motor Interview Questions & Answers -Three phase induction motor is very popular because it is rugged in construction. It needs very less

The following electrical Cables Interview Questions & Answers are very important and may be asked in interviews. The most important electrical Cables Interview Questions &
There is wide use of an induction motor. We use induction motor in the industries because it is robust, maintenance-free and very reliable motor. This
Q.51 What is the major disadvantage of the star-delta starting of induction motor? In a star-delta starter, the stator first gets connected to the