Adaptive control-Introduction
Adaptive control means adapting a control system so that the behavior of the control conforms to the new. The words “adaptive systems” and “adaptive control” approach were used as early as 1950.
Adaptive control is composed of a parameter estimator that generates parameter estimates online, as well as a control law for identified control, which is based on an identifier. Because there are other types of unidentified adaptive control, where control of systems is achieved without the use of an online parameter estimator.
Definition of Adaptive Control System
An adaptive control system, by construction, is non-linear since the expression of the control is a complex function of measured signals and time-varying gains.
In this article, we will study the identified adaptive control class.
Classification of Adaptive Control Systems
The structure of adaptive control is composed of a controller and a feedback loop with adjustable gains. In conjunction with the control system, the parameter estimator takes one of the two different approaches. They are-
- Indirect adaptive control
- Direct adaptive control
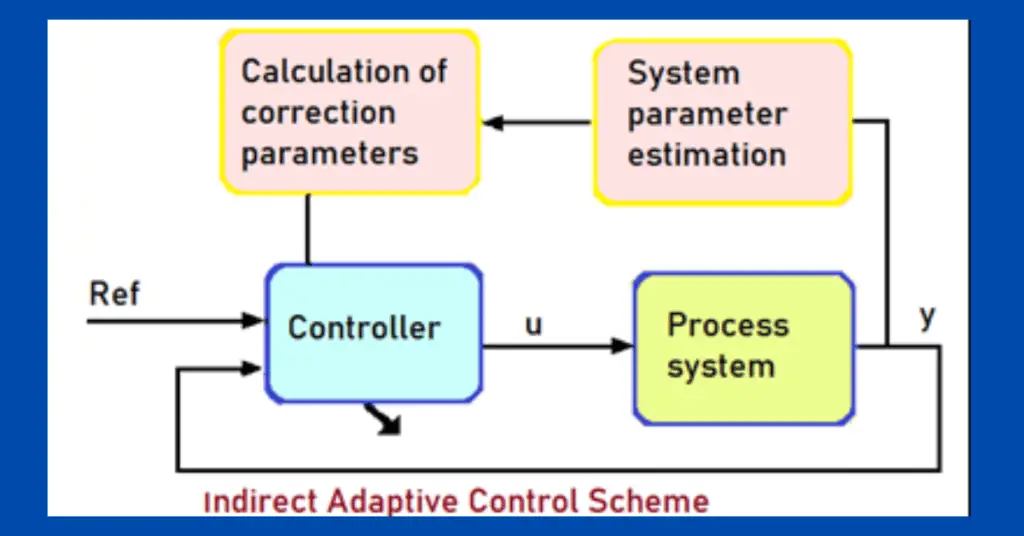
Indirect Adaptive Control
The first method is called indirect adaptive control, where the parameters of the system to order are estimated online and used to calculate the controller parameters.
At each instant “t” (sampling period), the estimated system is formed and treated as if it were the actual system to be commanded (from which the controller parameters are calculated). This procedure is also known as the “explicit adaptive” approach.
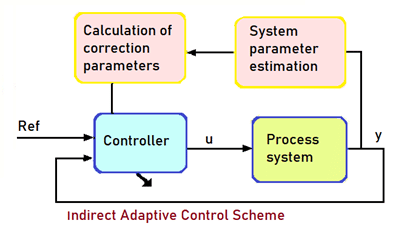
Instead of measuring the parameters of a system in real time, another approach is to estimate. We then speak of the identification (and not of measurement) of the parameters in real time. Indirect adaptive control is a natural concept- a controller is updated in real-time based on the estimation of system parameters, as shown in the above figure.
The estimated parameters can also be supported by an estimation of the system state vector.
Direct Adaptive Control
In the second approach called direct adaptive control, the system identification is parameterized according to the parameters of the desired controller, which are estimated directly (without intermediate calculations involving estimates of dynamic system parameters).
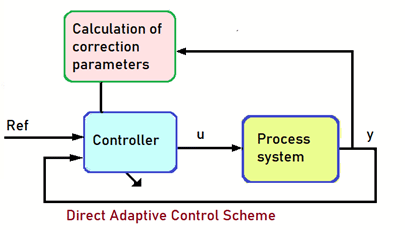
Unlike indirect adaptive control, direct adaptive control does not use a parameter estimator. A diagram of the principle of direct adaptive control is given in Figure 1.2.
The gains of a direct adaptive controller are directly updated according to the value of the measured output, symbolized in the above figure. Since there is no estimator, the power of computation necessary for the implementation of a direct adaptive controller is less important than that of an indirect adaptive
This approach is also called command implicit adaptive.
Indirect adaptive control can be applied to a larger class of plants with different regulator structures, but it suffers from a problem known as a stabilization issue.
At each instant, controller parameters are calculated based on system identification. Calculations such as these can be made provided the estimated system is either controllable and observable or at least stable and detectable. In the case of the minimum phase systems, other more complex control schemes adaptive have been developed.
In the case of unidentified adaptive control, the parameter estimator online is replaced by calculation methods to find the parameters of the controller, or by switching between different fixed controllers, assuming that at least one stabilizes the system covering all parametric uncertainties possible. We will describe the main characteristics and limits of the diagrams of unidentified adaptive control.
Adaptive Control with Reference Model (MRAC)
Whether the adaptive control is indirect or direct, the control loop can contain a predefined reference model (or MRAC, for Model Reference Adaptive Control) describing how the system should behave.
The case of adaptive control direct is schematized in the below figure.
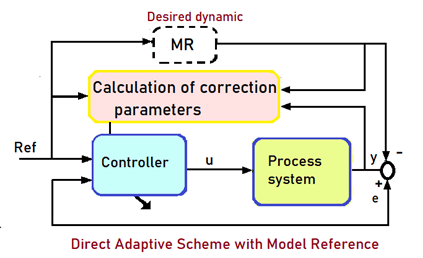
Without a reference mode, control is governed by the value of the measured output only.
In an adaptive control scheme with a reference model, the control is governed by the difference between the measured output of the model and that of the reference mode. The adaptive controller, therefore, aims to make this error zero.
The internal structure of the reference model, schematized by “MR” in the above figure, is composed of two controllers – a control system by feedback that provides stability and an open loop control type filter. Since the adaptation laws of these two controllers are generally identical, we simply synthesize them.
The control law by feedback and we deduce that of the pre-compensating filter.
The main advantage of control MRAC (Model Reference Adaptive Control) is that adaptation only takes place when the system does not follow the reference model. This is particularly the case when the system considered involves uncertainties.
The major drawback of MRAC is that it is necessary to assume that the system is capable to follow the trajectory generated by the reference mode. However, the assumption is not verifiable. We find the same problem s with the gain sequencing since we do not have a formal proof of the stability of a system with a reference model. However, this does not prevent not observing satisfactory results in practice.
Adaptive control is a tipical subject, difficult to understand. Article made to understand the subject with a great clarity. Thanks.
Being a retired person from Instrumentation & Control professional, I would like to appreciate the way of presentation. In industrial applications, adaptive control is less appllied.