In this article, we will discuss the characteristics of a stepper motor: static characteristics and dynamic characteristics.
A type of electric motor that is designed to operate in small and precise steps is known as a stepper motor. The operation of a stepper motor can be controlled by using a microcontroller or a digital computer. Stepper motors are widely in a variety of industrial and consumer appliances.
As mentioned above, this article will explain the behavior of a stepper motor under stationary conditions and running conditions, i.e. static characteristics and dynamic characteristics.
Static Characteristics of a Stepper Motor
The characteristics which are obtained under stationary conditions of a stepper motor are called its static characteristics.
Static characteristics of a stepper motor include two characteristic curves namely, the torque-displacement curve and the torque-current curve. Let us discuss these two curves in detail.
1. Torque-Displacement Curve
The graph drawn to show the torque developed in the stepper motor to displace it from its position of equilibrium is referred to as the torque-displacement curve of the stepper motor. From the curve, it can be observed that,
- The torque developed under the stationary condition increases linearly up to the displacement angle θ.
- After the displacement angle, the torque developed starts decreasing with a further increase in the displacement angle.
2. Torque-Current Curve
The graph plotted between the holding torque and the current drawn by the motor is called the toque-current curve.
In the stepper motor, the torque developed is directly proportional to the current through its winding. Thus, with the increase in the current of the stepper motor, the torque developed will increase.
Important Terms
- Holding Torque: The maximum value of the load torque applied to the motor shaft under excitation, and the motor can handle this torque without any change in its step position, i.e. keeping the load holding at a stationary position, is referred to as holding torque.
- Detent Torque: The amount of torque developed in the motor shaft for which the shaft remains in a static position, with no excitation, is called detent torque. Therefore, detent torque is produced due to permanent magnetism in the motor, with no current in the motor windings.
Dynamic Characteristics of a Stepper Motor
The characteristics of a stepper motor which are obtained under operating or running conditions of the motor are referred to as dynamic characteristics of the stepper motor.
Dynamic characteristics of stepper motors are important to know the suitability of the motor for different applications. The most important parameter of a stepper motor that is required to know the application suitability is the stepping rate for the input pulse. We can obtain the stepping rate of a stepper motor from its dynamic characteristics.
The dynamic characteristics, also called stepping rate characteristics, are shown in the following figure.
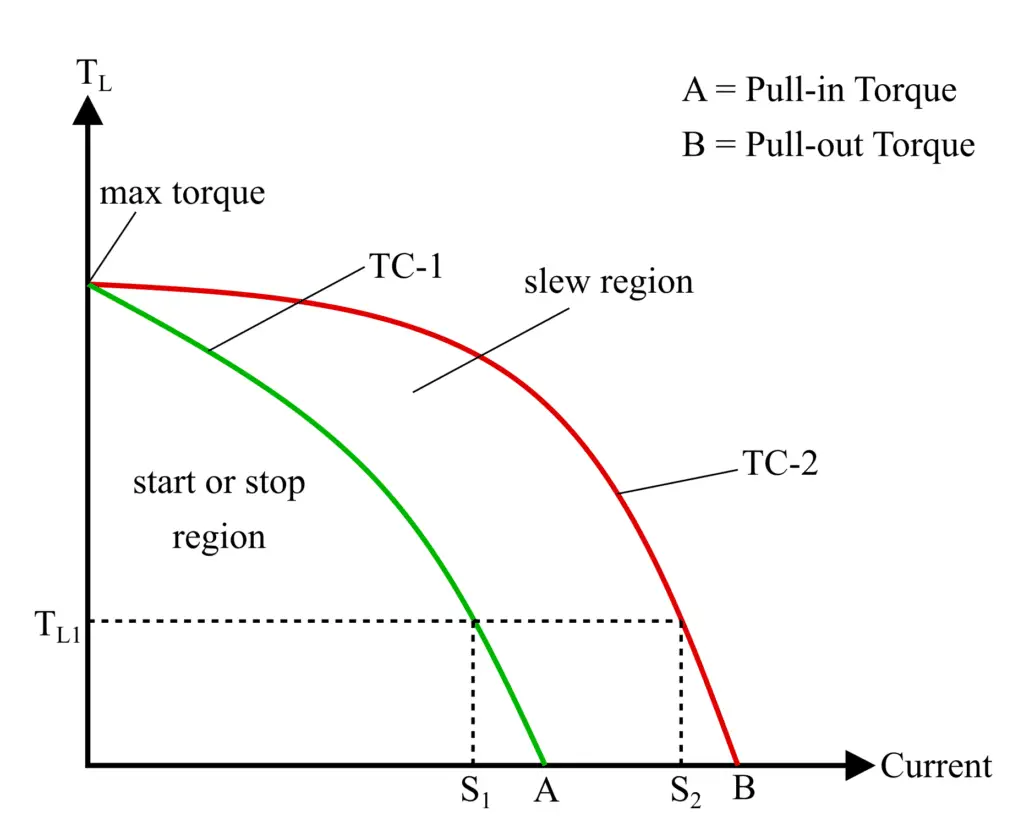
Note – When the number of steps is equal to the number of applied input pulses, then the stepper motor is said to be in synchronism.
In the above figure, TL represents the maximum load torque. In the dynamic characteristics, point A denotes the maximum stepping rate for which the stepper motor can start or stop without losing synchronism.
There are two torque curves specified by TC-1 and TC-2. In the graph, the region below the curve TC-1 is called the start or stop region. TC-1 shows the pull-in torque curve of the stepper motor. The region between curves TC-1 and TC-2 is called the slew region.
It is important to know that a stepper motor must always be operated in the slew region to make the stepping rate synchronized with the input pulse rate.
Hence, this is all about the characteristics of a stepper motor. Here, we discussed static as well as dynamic characteristics of the motor.
Related Articles:
- Induced EMF- Its Definition & Types
- What are Load Curves?
- Magnetization Curve of CT
- DC Motor or Direct Current Motor
- Difference between Stator and Rotor
- Universal Motor- Construction, Diagram, Working,Types & Characteristics
- Applications of Stepper Motor
- 14 Advantages and Disadvantages of Stepper Motor
- Types of Stepper Motor