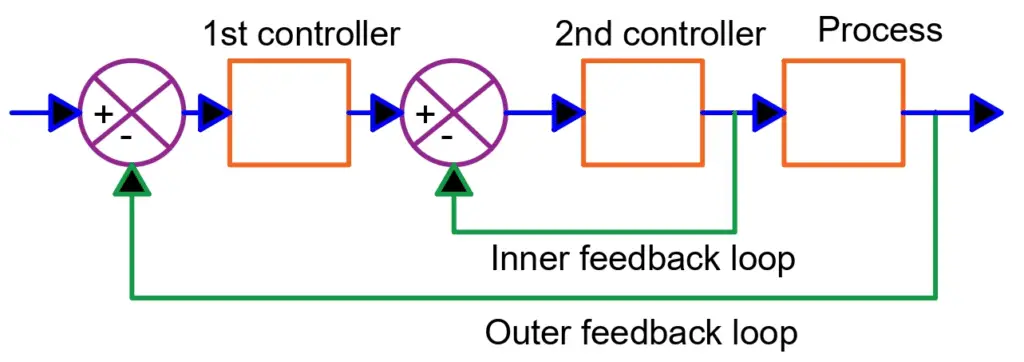
Cascade control is the type of control system strategy to control a system in which there are two controllers which are used. The two controllers are set in such a way that the output of the first controller provides the set point to the second controller. This is done by nesting the feedback loop for one controller into the other.
In the case of a single-loop control, the set point for the controller is usually set by the operator. In this case, the controller’s output will drive the final control element. But in this case, the response of the system is very basic and can have some errors due to many disturbances in the system or from outside the system. To improve the response of the system, there are other advanced control schemes, one of which is the cascade control.
The cascade control can be understood as a method of feedback combining. In this method of control, there is one manipulated variable and more than one measurement. A manipulated variable is a variable whose values are changed to achieve the desired output. With one manipulated variable it is possible to control only one output. Let us consider an example of CSTR (Continuously Stirred Tank Reactor).
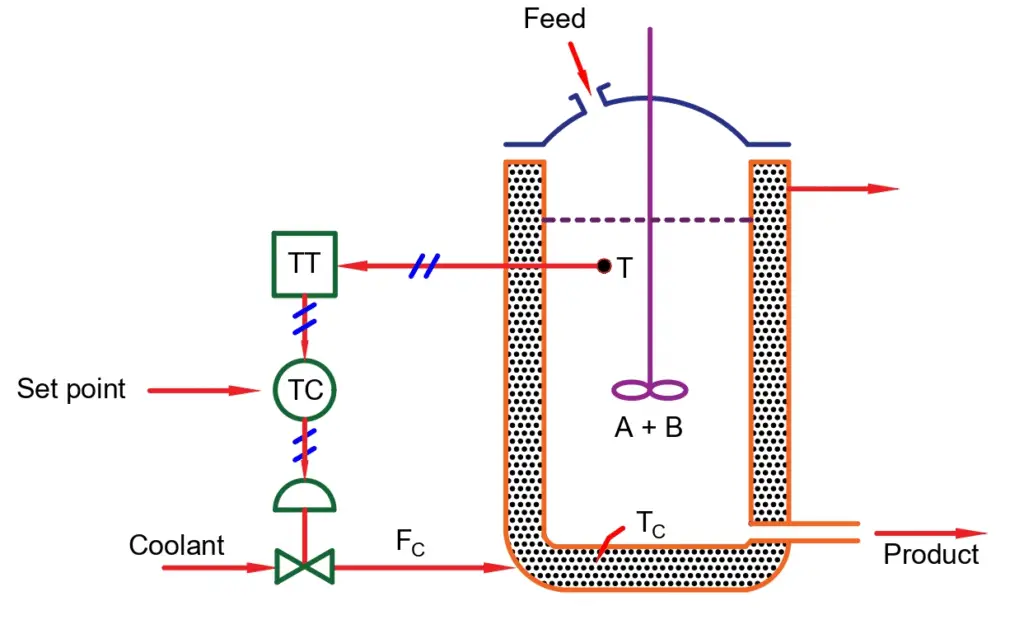
The reaction taking place in the CSTR is an exothermic reaction which means that it will release heat energy. The heat which is generated in the reaction is removed by the coolant that flows through the jacket around the tank.
In the CSTR system, keeping the temperature of the reacting mixture constant at a desired value is the control objective. The desired temperature is represented as T. Some disturbances which may affect the reactor are the temperature of the feed which is denoted by Ti and the temperature of the coolant which is denoted by TC. In this case, there is only one manipulated variable which is FC – the coolant flow rate.
In the normal feedback control, the temperature of the reacting mixture is measured by a sensor like RTD or thermocouple. This measured temperature is then transmitted by the temperature transmitter (TT) to the temperature controller (TC).
The temperature controller (TC) has a set point that is set by the operator. The controller will drive the valve (a final control element) according to its output signal and try to bring the temperature near the set point.
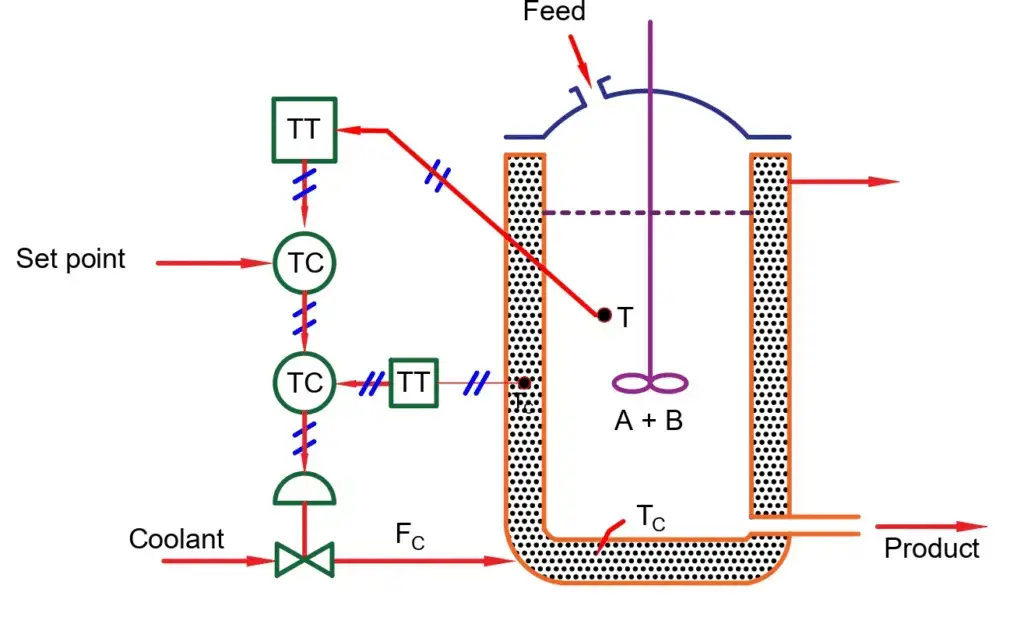
Cascade Control in CSTR:
The response can be improved by measuring the changes in the coolant temperature which is denoted by TC. This would take control action before the coolant temperature effect has been felt by the reaction mixture. So, when the coolant temperature increases TC, the flow rate of the coolant must also be increased so as to remove the same amount of heat.
When TC decreases, the flow rate of the coolant must also be decreased. So, there are two control loops that are used for two different measurements, desired temperature T and coolant temperature TC; but both these loops have a common shared manipulated variable i.e. the coolant flow rate FC.
Here in the cascade control loops of CSTR, there are two loops.
- Dominant/ Primary /Master Control loop: This loop is the loop that measures the temperature of the reacting mixture, T (controlled variable). This will use the set point that is given by the operator.
- Secondary / Slave control loop: This loop is the loop that measures coolant temperature TC. This will use the output of the primary controller as its set point.
This control configuration of two loops is called cascade control.
When to use Cascade Control
Cascade control is used when:
- There can be a lot of disturbances in a single loop.
- There is a need for a quick response.
- There is a situation where process changes would affect the control variable.
- When the second variable is controllable and can also give a quick response to the primary controller
Requirements for a Cascade Control
- The primary loop can never be faster than the secondary loop.
- The secondary loop must experience maximum disturbance.
- The secondary loop can also have disturbances that are not expected.
- The secondary loop should be such that it has a direct influence on the primary loop.
- The secondary loop should be such that it is controllable and can be measured also.
- The secondary loop should operate faster than the primary loop.