The air gap in an induction motor—the small physical distance between the stator and the rotor—has a major impact on the machine’s performance. Although it is just a few millimeters wide, this motor air gap influences several critical parameters such as magnetizing current, power factor, noise, cooling, and overload capability.
Understanding the role of the air gap between stator and rotor helps electrical engineers design more efficient and reliable motors.
What Is the Air Gap in Induction Motor?
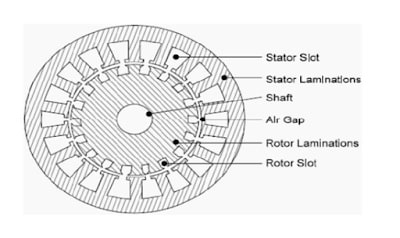
The induction motor has a stator and the rotor as its major parts. The stator is a stationary part, and the rotor is a rotating part. The stator of the motor has overlapping coils that are physically placed 120 degrees electrically apart.
When the stator is connected to the three-phase supply source, a rotational magnetic field of constant magnitude and a varying direction is produced. The flux produced in the stator travels through the air gap and gets linked to the rotor conductors.

The rotor winding is short-circuited through end rings or connected to the external resistance.
The linking flux of the stator induces EMF in the rotor circuit, and the current starts flowing in the short-circuited rotor winding because of the induced EMF in the rotor.
Due to the rotor current and main flux interaction, the torque is produced, and the motor starts rotating.
In the stator, the electric energy converts into magnetic energy.
This conversion and interaction would not be possible without the presence of an air gap, which acts as the medium through which magnetic flux travels from stator to rotor.
The air gap is the physical space between the stator and the rotor. Though it is small—typically in millimeters—it plays a crucial role in determining the motor’s performance, efficiency, power factor, and starting torque.
The magnetic energy travels through the air gap of the motor. The air gap increases the reluctance of the magnetic circuit, which affect the motor performance factors.
Designing the air gap to an optimal length is essential. Too small an air gap increases the risk of rotor-stator contact, while too large an air gap demands more magnetizing current, thereby reducing efficiency.
Air Gap in Motor and Its Role in Magnetic Circuit
The air gap plays a significant role in the performance of the motor. It forms part of the magnetic path and directly impacts the total reluctance of the magnetic circuit.
In electrical analogy, magnetic reluctance is comparable to electrical resistance. Therefore, just as resistance limits current in an electric circuit, the air gap’s reluctance limits magnetic flux in a motor.
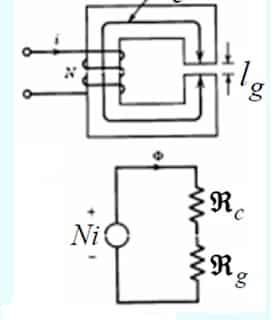
A larger air gap increases the total reluctance, requiring higher magnetomotive force (MMF) to maintain the same flux. This leads to higher magnetizing current and affects motor characteristics like power factor, efficiency, and torque.

Where,
Rc and Rg are the reluctance of the magnetic and the sir gap circuit.
The air gap plays a significant role in the performance of the motor.
How Air Gap Affects Induction Motor Performance
The air gap length affects the following performance parameters of the induction motor.
- Magnetizing current
- Power factor
- Overload Capacity
- Cooling
- Noise
Magnetizing Current & Power Factor Impact
The magnetizing current of the motor depends on the specific magnetic loading and the air gap length of the machine. A large air-gap length leads to a higher magnetizing current and poor power factor.
A large air-gap length increases the reluctance of the magnetic flux path. The reluctance of the magnetic circuit is similar to the resistance of the electric circuit. The reluctance of a magnetic circuit is;
R=MMF/Φ —–(1)
Also,
R= L/μA ——-(2)
MMF=RΦ
Φ =MMF/R
Φ =MMF*(μA /L) —–(3)
Where,
R = Reluctance of the magnetic circuit
MMF = Magnetomotive force(MMF=NI)
L = length of the air gap
Φ = Flux in the air gap
μ = Permeability of the magnetic material
Equation (3) clearly shows that the MMF required for producing and sending the flux through the air gap depends on the flux density and the air-gap length.
If the air gap length is increased, the magnetic circuit’s reluctance will increase. This increase in reluctance will demand more magneto-motive force to produce the required flux in the motor.
To meet the additional requirement of MMF, the stator magnetizing current increases.
The increased magnetizing current leads to more reactive power consumption without contributing to useful torque, thereby reducing the power factor of the motor.
As a result, the motor draws more current from the supply to deliver the same mechanical output, which reduces system efficiency.
Impact on Power Factor
The motor’s power factor worsens with an increase in magnetizing stator current. The phasor diagram of the motor having small and large air gap lengths is shown below.
The relationship between the air gap length and the power factor can be well understood with the following phasor diagram.
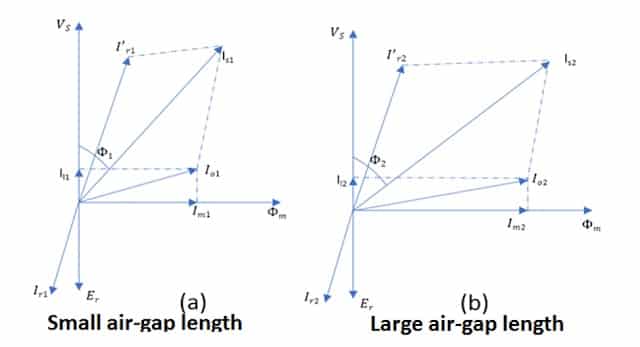
The air gap length in Fig (b) is more than the air gap in Fig (a). The angle between the applied voltage and the stator current is greater in Fig (b) than in Fig (a).
With an increase in air gap length, more magnetizing current is required to produce the rated flux in the magnetic core, and the phase angle between the applied voltage and the magnetizing current increases. As a result, the power factor becomes low.
Therefore, optimizing the air gap is essential to achieve a balance between mechanical clearance and electrical performance.
Overload Handling Capability
The leakage flux is reduced with an increase in air gap length. The flux produced in the stator winding gets almost fully coupled with the rotor winding if the air gap length is more.
Therefore, the overload capacity of a large air gap length motor is more than that of a motor with a small air gap length. With increased air gap length, the leakage reactance decreases, and the overload capacity increases.
This improved magnetic coupling in motors with a larger air gap helps maintain torque generation even under temporary overloading conditions.
As a result, motors with larger air gaps handle brief surges of high mechanical load more effectively.
However, this advantage must be balanced against the increased magnetizing current and reduced power factor caused by a wider air gap.
Cooling Efficiency
With a large air gap length, the stator and the rotor are separated by a large distance, so cooling is better.
The copper loss(I2*R Loss) occurs in the stator and rotor winding, and the iron loss occurs in the core. The heat is quickly transferred if the motor has a large air gap.
The winding insulation can be used in the H or F classes with a temperature rise limit to the B class if the air gap length is greater.
This improved thermal behavior due to a larger air gap also allows motors to operate more efficiently under high-load or extended-duty conditions.
Additionally, better heat evacuation can reduce the need for external cooling mechanisms, potentially lowering maintenance requirements and operational costs.
Motor Noise Levels
The leakage flux reduces with a large air gap length. As a result, motor produce less noise.
This reduction in noise is especially noticeable at no-load and light-load conditions, where magnetic vibrations contribute significantly to the overall sound.
Motors with optimized air gap dimensions are therefore preferred in applications demanding low acoustic emissions, such as HVAC systems, hospitals, and office equipment.
Tooth Pulsation Loss
The tooth pulsation loss reduces in a large air gap length motor because of a small variation in the reactance of the air gap.
This is due to the fact that a wider air gap smooths the permeance waveform, reducing flux density fluctuations at the stator teeth.
As a result, iron losses from rapid changes in flux linkage minimizes, contributing to better efficiency and lower thermal stress in the core.
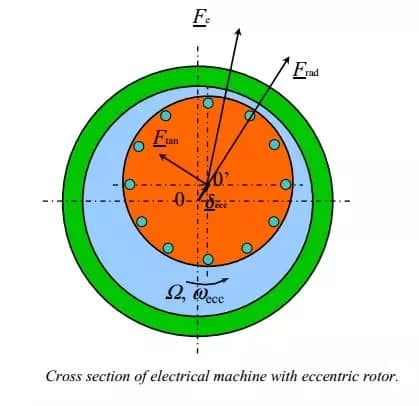
Unbalanced Magnetic Pull
An unequal air gap causes an unbalanced magnetic pull. The unbalanced magnetic pull acts in the direction of the shortest air gap.
This eccentric pull results in lateral forces on the rotor, which can lead to mechanical vibration, increased bearing wear, and noise over time.
The unbalanced magnetic pull can be minimized by tight tolerances or by making the air gap large within all design constraints.
A motor with a small air gap length draws less magnetizing current, and the motor’s power factor is better than a motor with a large air gap length.
However, overly tight air gaps must be avoided, as they increase the risk of rotor-stator contact due to thermal expansion or misalignment.
Air Gap in Induction Motor Formula
Unlike in a transformer, it is impossible to have zero air gap for a rotating machine. The rotating machine must have an air gap for its rotation.
The optimum air gap of an induction motor can be expressed by the following empirical formula. This formula gives a good balance between performance and mechanical safety in typical industrial motors.
lg = 0.2 + 2√(LD) mm
Where:
- lg = Air gap Length (mm)
- L = Stator core Length (meter)
- D = Internal diameter of the Stator core (meter)
This relation accounts for the physical size of the motor, ensuring the air gap is proportionate to both length and diameter of the stator core.
Air Gap Length of Induction Motor Formula Example
To better understand how this formula is used in practice, let’s go through an air gap length of induction motor formula example:
Suppose:
- Stator Core Length (L) = 0.18 m
- Stator Core Diameter (D) = 0.34 m
Then:
lg = 0.2 + 2√ LD mm
= 0.2 +2√0.18*0.34
= 0.2 +0.494
= 0.694 mm
Therefore, the optimum air gap length between the stator and rotor is 0.694 mm
In practice, this value may slightly vary depending on specific motor ratings, insulation requirements, and manufacturing tolerances.
The designer keeps the minimum air gap length in the energy-efficient motors to improve the power factor and reduce the no-load losses in the motor.
However, too narrow a gap increases the risk of mechanical contact between stator and rotor during operation, especially due to thermal expansion or shaft misalignment.
Conclusion
The air gap in an induction motor significantly affects its performance. Engineers must optimize it to balance efficiency, reliability, and thermal behavior.
Key effects of the air gap:
- Smaller air gap:
- Reduces magnetizing current
- Improves power factor
- Increases risk of rotor-stator contact
- Larger air gap:
- Enhances cooling and overload handling
- Increases magnetizing current
- Lowers power factor
Optimal air gap design improves:
- Efficiency
- Torque performance
- Acoustic behavior
- Longevity of motor parts
Always design the air gap with both electrical performance and mechanical safety in mind.
Related Articles:
very nicely explained about the importance of air gap in an Induction machine.i would like to know about compensation technique in DC machines.