Stepper motors are essential in applications requiring precise motion control, such as robotics, CNC machines, 3D printers, and automation systems. Unlike conventional motors, stepper motors rotate in discrete steps, allowing exact positioning without complex feedback systems. Understanding the types of stepper motor helps designers choose the right motor based on rotor construction and winding configuration, providing flexibility for different torque, speed, and precision requirements.
Stepper motors are classified based on rotor construction and winding configuration, giving designers flexibility for different torque, speed, and precision requirements.
What is a Stepper Motor?
A stepper motor is an electromechanical device that converts electrical pulses into discrete mechanical movements. Each pulse moves the rotor by a fixed step angle, enabling precise position control.
Advantages:
- Accurate positioning without feedback
- Reliable and low-maintenance
- Simple digital control
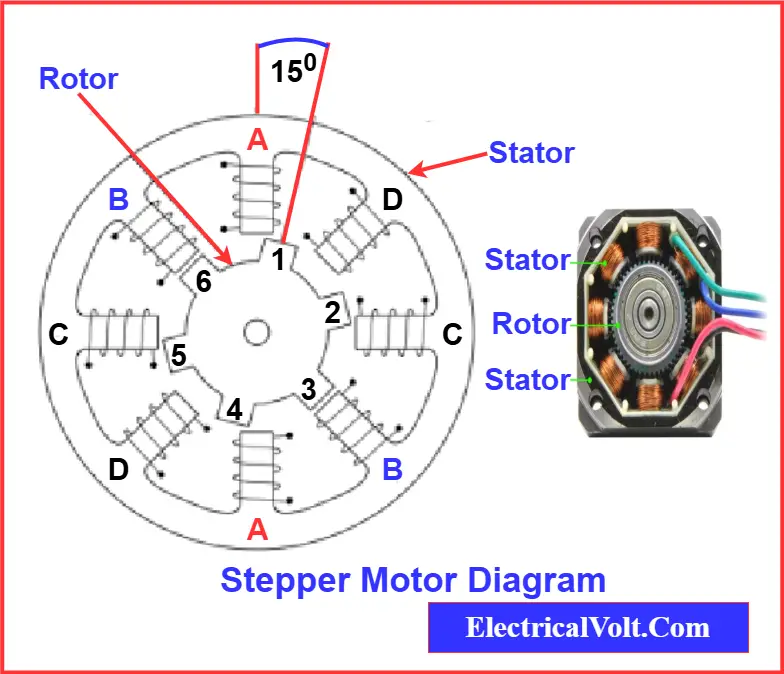
Stepper Motor Working Principle
A stepper motor operates based on the principle of electromagnetic induction. It consists of two main parts — a rotor (usually made of permanent magnets or a soft iron core) and a stator (composed of multiple coils or windings).
When one or more stator windings are energized, an electromagnetic field is produced. The rotor aligns itself with this magnetic field due to magnetic attraction. By energizing the stator windings in a specific sequential order, the rotor moves in small, fixed steps.
For example:
- When coil A is energized, the rotor aligns with the magnetic field of that coil.
- When coil B is energized next, the rotor rotates clockwise by a defined step angle (say 45°).
- When coil C is energized, the rotor moves another 45°.
- Similarly, when coil D is energized, the rotor moves another 45°, and so on.
This sequential energizing of coils continues, causing the rotor to rotate smoothly in discrete steps — a process that enables accurate and repeatable motion control.
Classification of Stepper Motors
1. Based on Rotor Construction
a) Permanent Magnet (PM) Stepper Motor
- Rotor: Contains permanent magnets.
- Step Angle: Typically ranges from 7.5° to 15°.
- Operation: Current through the stator coils interacts with the rotor’s magnets, producing precise rotational steps.
- Torque & Design: High torque at low speeds and simple design.
- Applications: Ideal for small printers, automotive gauges, and basic positioning devices that require moderate precision.
b) Variable Reluctance (VR) Stepper Motor
- Rotor: Made of soft iron with teeth; contains no permanent magnets.
- Step Angle: Small, typically ranging from 1.8° to 15°.
- Operation: The rotor aligns itself to minimize magnetic reluctance when the stator coils are energized, producing precise steps.
- Torque & Speed: Offers high speed and good resolution, but lower torque compared to other stepper motors.
- Applications: Commonly used in robotics, textile machines, and high-speed automation where speed and precision are more important than torque.
c) Hybrid Stepper Motor
- Rotor: Combines permanent magnets and toothed structure for precise operation.
- Step Angle: Very small, typically 0.9° to 1.8°, allowing high-resolution positioning.
- Operation: Integrates the advantages of PM and VR motors, delivering accurate steps, smooth motion, and good torque.
- Torque & Speed: Offers high torque and smooth operation at low to medium speeds.
- Applications: Widely used in CNC machines, 3D printers, medical equipment, and robotic systems that require high precision.
2. Based on Winding Configuration / Drive
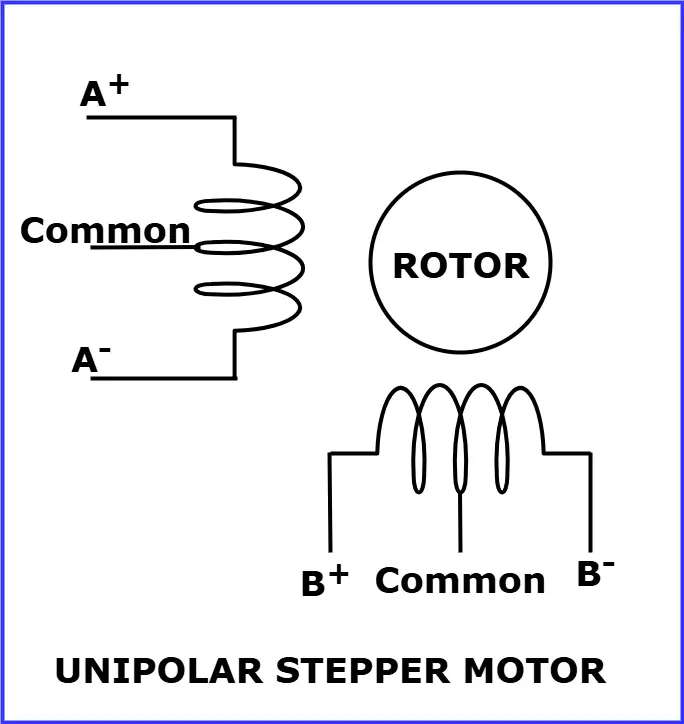
a) Unipolar Stepper Motor
- Stator Windings: Center-tapped, allowing current to flow in one direction per coil.
- Wires: Typically 4, 5, or 6 wires depending on design.
- Operation: Energizes one half of each coil sequentially, creating a magnetic field that rotates the rotor in discrete steps.
- Torque & Control: Simple to control but produces lower torque compared to bipolar motors.
- Applications: Ideal for small-scale automation, hobby projects, and consumer electronics where high torque is not critical.
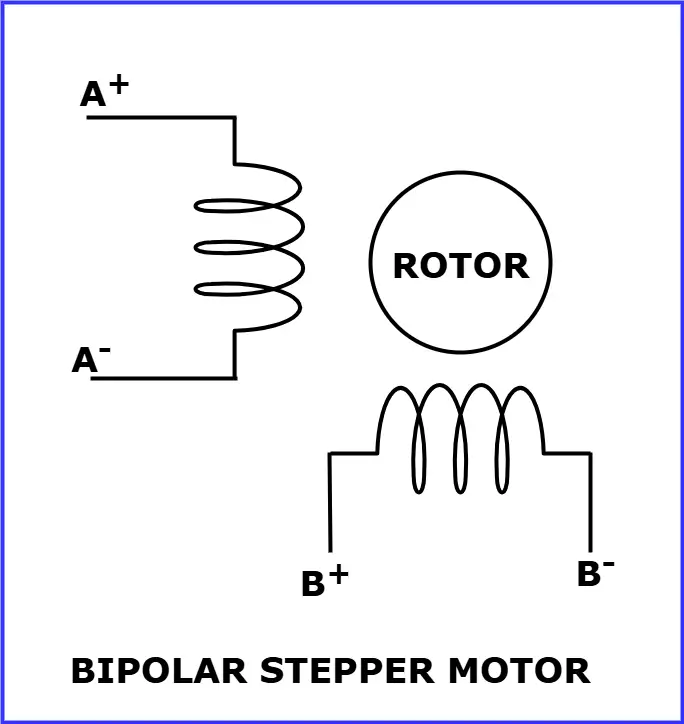
b) Bipolar Stepper Motor
- Rotor & Windings: Each phase has two independent windings with no center tap.
- Wires: Typically 4 wires, one for each end of the windings.
- Operation: Requires current reversal through the windings, producing bidirectional torque for precise stepwise rotation.
- Torque & Control: Higher torque and efficiency compared to unipolar motors, though control circuitry is more complex.
- Applications: Commonly used in CNC machines, 3D printers, and industrial automation where high precision and torque are essential.
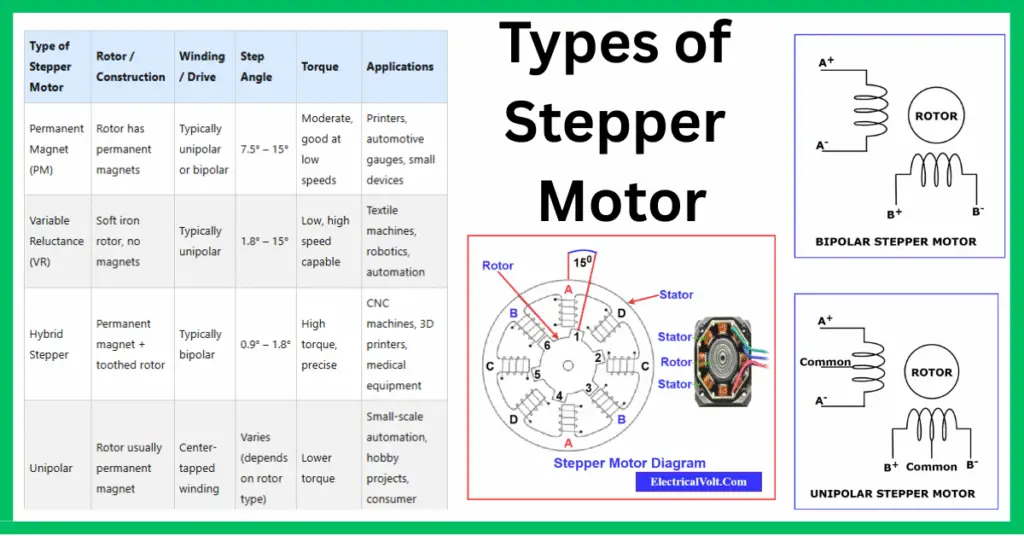
Summary Table: Types of Stepper Motor
| Type of Stepper Motor | Rotor / Construction | Winding / Drive | Step Angle | Torque | Applications |
| Permanent Magnet (PM) | Rotor has permanent magnets | Typically unipolar or bipolar | 7.5° – 15° | Moderate, good at low speeds | Printers, automotive gauges, small devices |
| Variable Reluctance (VR) | Soft iron rotor, no magnets | Typically unipolar | 1.8° – 15° | Low, high speed capable | Textile machines, robotics, automation |
| Hybrid Stepper | Permanent magnet + toothed rotor | Typically bipolar | 0.9° – 1.8° | High torque, precise | CNC machines, 3D printers, medical equipment |
| Unipolar | Rotor usually permanent magnet | Center-tapped winding | Varies (depends on rotor type) | Lower torque | Small-scale automation, hobby projects, consumer electronics |
| Bipolar | Rotor usually permanent magnet | Two windings per phase, current reverses | Varies (depends on rotor type) | Higher torque | CNC machines, 3D printers, industrial automation |
Stepper Motor Driving Methods
Stepper motors can also be classified based on how they are driven:
- Wave Drive: Energizes one winding at a time, producing simple stepwise motion. Torque is lower compared to other methods.
- Full-Step Drive: Energizes two windings simultaneously for maximum torque and stronger magnetic force.
- Half-Step Drive: Alternates between one and two windings energized, providing finer step resolution while torque varies slightly.
- Microstepping: Divides steps into fractions by controlling current levels, allowing ultra-smooth and precise motion, though torque per step is reduced and driver circuitry is more complex.
Popular Stepper Motors & Drivers
| Popular Stepper Motors | Features / Applications | Popular Stepper Motor Drivers | Features / Applications |
| NEMA 17 | Versatile; used in 3D printers, CNC machines, robotics; good balance of torque, size, cost | ULN2003 | Cost-effective; suitable for low-power motors; hobby projects, small automation |
| NEMA 23 | Larger, higher torque; industrial CNC, motion control systems | DRV8825 | Supports microstepping; high current; smooth motion and high torque |
| NEMA 34 | Heavy-duty; high torque and precision; large CNC, industrial robotics | TMC2209 | Quiet and efficient; stall detection, sensorless homing; 3D printers, motion control |
| NEMA 14 | Smaller; compact devices; mini 3D printers, scanners, medical equipment | A4988 | Affordable, reliable; supports microstepping; hobby projects, 3D printers, CNC machines |
| 28-BYJ48 | Affordable, easy-to-use; hobbyist projects, small automation, Arduino DIY kits | TMC2208 | Quiet operation, efficient; StealthChop2 and SpreadCycle; noise-sensitive applications |
| – | – | TB6600 | Robust for high-power motors; adjustable current and protection; industrial setups |
| – | – | TMC5160 | High-performance; advanced current control and diagnostics; demanding precision motion control |
Conclusion
Stepper motors are versatile and reliable for precise positioning applications. Choosing the right type of stepper motor—PM, VR, Hybrid, Unipolar, or Bipolar—depends on torque, speed, and accuracy requirements. Understanding these types ensures optimal performance in robotics, CNC machines, 3D printing, and automation systems.
Related Articles: